Summary:
The image quality of a security feed is critical in maintaining safety in the surveillance area. Security camera image quality is most easily undermined by shaking camera frames which can be the result of wind, nearby machinery, or passing vehicles. My responsibility was to reproduce, in a lab setting, the motions that cameras experience in the field in order for Bosch to develop mechanical, optical, and digital stabilization on their camera systems.
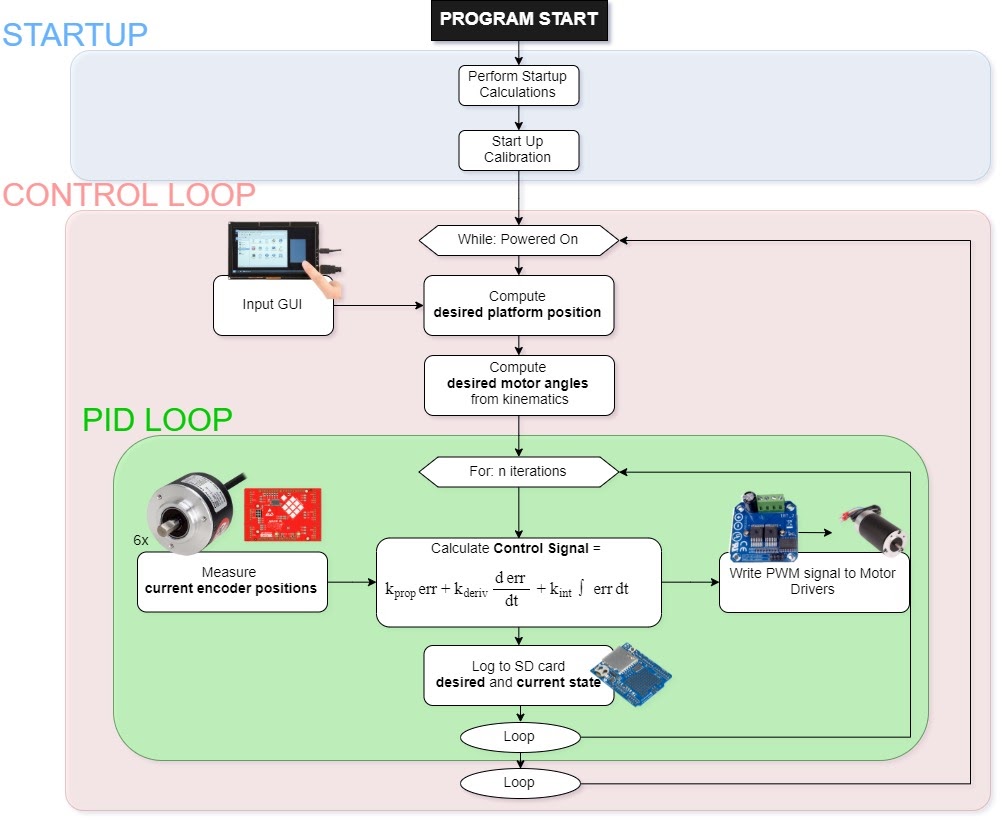
To control the hexapod, we used inverse kinematics to determine the desired motor angles. Using encoders and an Arduino, we implemented a PID control loop to direct the motion. We also developed a simple Raspberry Pi GUI and a set of joysticks to send commands to the Arduino.

Joystick Control on V1.0 Hexapod 
Y-Axis Motion on V2.0 Hexapod 
Shaft Exploded View 
Arduino Control Algorithm 

Full Setup




I initially worked on the project by myself as a summer internship, but I was able to continue it as my Senior Capstone Project with two other undergraduate students. Unfortunately, due to COVID-19 we were unable to fully iterate on our fall prototype. We have completed a V1.0 fall prototype and have completely designed, simulated, and ordered the components for our V2.0 final product. We are working to extend the project into the fall 2020 semester.